Introduction
FROST (Fast Robot Optimization and Simulation Toolkit) an open-source MATLAB toolkit developed by AMBER Lab for dynamical system modeling, trajectory optimization and model-based control design of robotic systems, with a special focus in dynamic locomotion whose dynamics is hybrid in nature. The design objective of FROST is to provide a unified software environment for developing model based control and motion planning algorithms based on Hybrid Zero Dynamics framework for robotic systems.
Features
- Equipped with custom symbolic math toolbox for MATLAB using Mathematica Kernel
- Hierarchical structures for describing general hybrid dynamical systems
- Symbolic calculation of system dynamics, kinematics and other constraints
- Specific supports for multibody systems described by standard URDF files
- Automatic construction of trajectory optimization problems
- Fast, reliable and scalable optimization algorithms
- Hybrid zero dynamics and virtual constraints
- Extendable to other dynamical systems, such as autonomous vehicles
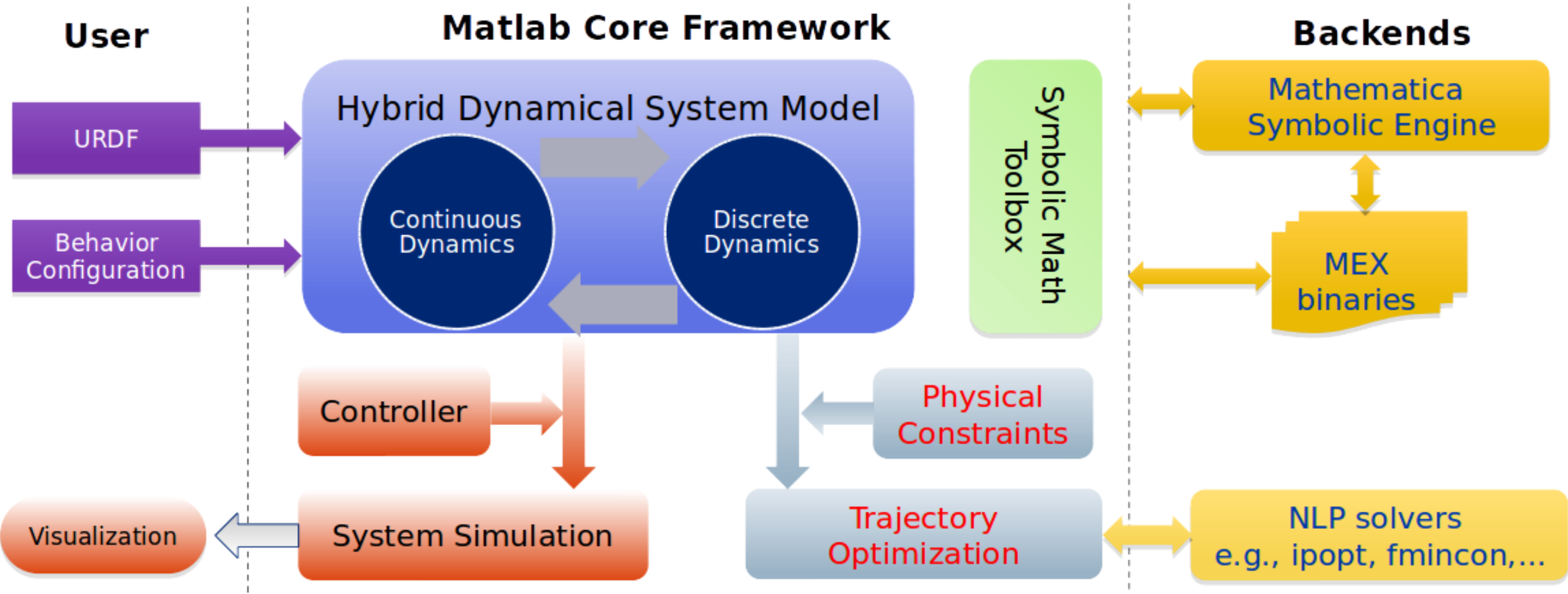
Structure and Functionality
- FROST uses directed graphs to describe the underlying discrete structure of hybrid system models, which renders it capable of representing a wide variety of robotic systems.
- FROST is equipped with a custom symbolic math toolbox in MATLAB using Wolfram Mathematica, enables users to rapidly prototype the mathematical model of robot kinematics and dynamics and generate optimized code of symbolic expressions to boost the speed of optimization and simulation.
- FROST utilizes virtual constraint based motion planning and feedback controllers for robotic systems to exploit the full-order dynamics of the model for agile and dynamic behaviors.
- FROST provides a fast and tractable framework for planning optimal trajectories of hybrid dynamical systems using advanced direct collocation algorithms.